

Abstracto
Anteriormente,
hemos demostrado la posibilidad del fMRI en dos perros despiertos y
sin restricciones. Aquí, se determinó la replicabilidad y la
heterogeneidad de estos resultados en otros 11 perros para un total
de 13 sujetos. Basada en una anatómicamente colocada región de
intereses, se comparó la respuesta del caudado a una señal con la
mano indicando la disponibilidad inminente de una recompensa de
comida a una señal con la mano indicando que no hay recompensa. 8 de
13 perros tuvieron una respuesta del caudado diferencial positivo a
la señal que indica la recompensa. La respuesta media caudado
diferencial fue de 0,09%, que era similares a las comparadas con la
de un estudio humano. Estos resultados muestran que fMRI Canino es
fiable y se puede hacer en los perros con un mínimo de estrés.
Introducción
A medida
que las más antiguas especies domesticadas, las mentes de los
perros, inevitablemente, han sido formadas por milenios de contacto
con los seres humanos. Como resultado de esta evolución física y
social, los perros, más que cualquier otra especie, han adquirido la
capacidad de comprender y comunicarse con los humanos. Anteriormente,
nuestro grupo publicó la primera demostración de fMRI en dos,
perros despiertos sin restricciones. Con el uso de refuerzo positivo,
capacitamos a los perros a ser muy cooperativa durante fMRI.
En
nuestro primer experimento, se utilizó una tarea de condicionamiento
instrumental sencillo en el que el comportamiento requerido era
colocar la cabeza en un custom, mentonera anatómicamente diseñada y
que no se moviera. Después de un intervalo variable de de
aproximadamente 5 segundos, cualquiera de las dos señales con la
mano separadas fue dado que indicaba la presencia o la ausencia de
una recompensa de comida que el recibiría. La mano izquierda indica
una recompensa de salchichas, mientras que las dos manos apuntando
hacia la otra en sentido horizontal indicaban que no había ninguna
recompensa. Las señales de con la mano fueron elegidas para ser
fáciles de distinguir y se mantuvieron durante aproximadamente 10
segundos. De acuerdo con el error de predicción de recompensa (EPR)
la teoría de la liberación de dopamina, se observó una activación
significativa en el caudado ventral de los dos perros en respuesta a
la señal con la mano que indica "la recompensa" en
relación con la señal con la mano que indicaba "que no había
recompensa"

El
principal reto del fMRI en los perros viene de sujetos en movimiento.
Históricamente, el enfoque usual había sido ya fuera anestesiado el
animal o, como en las ratas y en los monos, inmovilizados. Está
claro que si queremos comprender la cognición canina, la anestesia
no es una opción. Por otra parte, la anestesia altera la función de
la respuesta hemodinámica y puede arrasar en las estructuras
subcorticales. La inmovilización es técnicamente posible, aunque
éticamente objetable para un perro e impone condiciones emocionales
no naturales que pueden sesgar la exactitud de un estudio de
investigación. Por otra parte, como hemos demostrado anteriormente,
la inmovilización es innecesaria para adquirir datos útiles del
fMRI. En su lugar fue porque los perros siguen tan fácilmente las
órdenes humanas, que pueden ser entrenados para entrar en un marco
asociativo un escáner de resonancia magnética y sin restricciones
mantienen su cabeza inmóvil, para que podamos llevar a cabo
eficazmente los estudios del fMRI.
El
objetivo del presente estudio fue doble: 1) determinar si nuestros
resultados anteriores pudieran ser replicados, y 2) determinar la
heterogeneidad de las respuestas del caudado en los perros a las
señales con la mano humana que indicaban la presencia y ausencia de
una recompensa. Aquí, se presenta los resultados en otros nueve
perros y mejoras en la formación, la adquisición de las imágenes y
los análisis de los datos del fMRI canino despierto sin
restricciones.
Métodos:
Declaración de Ética
Este
estudio se llevó a cabo en estricta conformidad con las
recomendaciones de la Guía para el Cuidado y Uso de Animales de
Laboratorio de los Institutos Nacionales de Salud. El estudio fue
aprobado por la Universidad de Emory IACUC (Protocolo #
DAR-2001274-120814BA). Todos los propietarios de los perros dieron su
consentimiento por escrito para participar en el estudio.

El
Adiestramiento
Basándonos
en nuestra experiencia inicial, se ha desarrollado un programa de
adiestramiento para los perros que les enseña a entrar
cooperativamente en el escáner de resonancia magnética . El
programa se basa en la aclimatación al ruido del escáner de
resonancia magnética , pasar por el recinto estrecho del escáner y
las vibraciones de operación y la configuración y el encadenamiento
último de varios comportamientos necesarios.
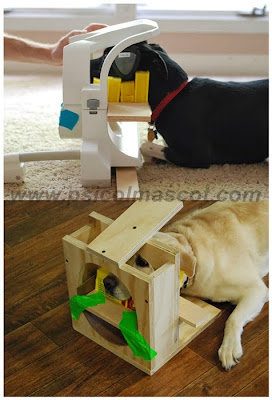
Para ello, hemos
construido dos réplicas de resonancias magnéticas, cada una de las
cuales consisten en un tubo de aproximadamente las mismas dimensiones
que el agujero interior del actual Siemens MRI , una mesa de paciente
, medidas portátiles y múltiples bobinas receptoras simulados que
se adhieren estrechamente a las dimensiones de una bobina de cuello
humano. También se construyó una mentonera patentada que facilita
el confort y la colocación adecuada de los animales y que adaptamos
el aparato por la singularidad de la anatomía canina. Una vez que
los animales tuvieron la confianza y competencia en relación con
todos los pasos preparatorios, demostrado por completar un MRI
simulado en el aparato de reproducción, que entonces se realizaron
exploraciones en vivo en el actual Siemens MRI .
Hemos
recopilado grabaciones de audio digitalizadas de las diversas
secuencias del escáner. Para ayudar en la desensibilización y la
aclimatación necesaria a los ruidos del escáner, cuando los
adiestrábamos, jugábamos con las grabaciones a través de un PA
sistema dirigido hacia el simulador. Hemos verificado los niveles de
presión de sonido con un medidor de decibelios de mano para
confirmar que una vez finalizado el proceso de formación nos
acercamos al nivel de 96 dB del escáner real. Localizamos
simuladores de resonancia magnética en la casa de uno de los
propietarios y en un centro de formación contratado. Proporcionamos
bobinas receptoras de simulacros para todos los propietarios
participantes para llevárselos a casa, lo que alentó el
adiestramiento diario, adelantando logro de las metas, y mucho mejor
permitió a los perros para que se sintieran cómodos con un
componente clave del proceso en el ambiente que es más familiar para
el perro.
Sólo el
refuerzo positivo, en combinación con la formación del
comportamiento, el acondicionamiento y el encadenamiento, se
utilizaban en el proceso del adiestramiento. En primer lugar, los
perros están entrenados para poner su cabeza y las patas en la
bobina de la cabeza. A continuación, se les enseña a colocar la
barbilla sobre un apoya-mentón colocado horizontalmente a través de
la bobina de la cabeza y que mantuviéran esta posición hasta que se
les diera una señal de liberación. El tiempo de aguante se
aumentaba gradualmente hasta los 30 segundos. Cuando los perros eran
capaces de hacer esto de forma consistente con el movimiento de la
cabeza no discernible, estos estaban adiestrados para hacer esto
llevando orejeras caninas, que se introdujeron inicialmente para los
animales aparte del simulador de bobina.
Al mismo
tiempo que las secuencias iniciales del adiestramiento, las
grabaciones del ruido del escáner se introducen a un volumen bajo.
Una vez que el animal queda condicionado a un volumen bajo, el
volumen se incrementa gradualmente. Las grabaciones de ruido del
escáner se introducen con un volumen bajo mientras que el perro
permanece estacionaria en la bobina. Una vez que el perro muestra un
comportamiento relajado, el volumen se incrementa gradualmente.
Cuando los perros se sienten cómodos usando las orejeras en la
cabeza de la bobina con el ruido del escáner de aproximadamente 90
dB, se crean después de entrar en el tubo de resonancia magnética
que se coloca en el suelo. Posteriormente, la bobina de la cabeza
simulada se coloca dentro del tubo. Después de que el perro esté
haciendo constantemente su cabeza todavía en esta configuración, el
aparato entero se levanta sobre una mesa a la altura de la mesa real
del escáner del paciente. Los perros son adiestrados para subir los
escalones en el tubo. Por último, se aumenta la distancia para que
el perro trabaje lejos del guía.
Con una
cuidadosa selección canina, algunos perros pueden completar la
formación en apenas un par de semanas. Más comúnmente, hemos
encontrado que entre 2 a 3 meses de adiestramiento con sesiones de
prácticas supervisadas cada dos semanas conduce a una alta tasa de
éxito en la primera sesión de digitalización. Hasta la fecha,
hemos capacitado a 15 perros, y 13 de 15 (87%) han completado con
éxito el análisis. Excepto por el primer perro (Callie), cuya
digitalización se llevó a cabo por ensayo y error, diez de los
otros 12 perros completaron la exploración en el primer intento. Los
perros restantes se convirtieron en sensibilizados al ruido y se
requiere aún más la desensibilización. Ambos tuvieron éxito en el
segundo intento.

El
Escaneo MRI
Todo el
escaneado se llevó a cabo en un escáner de todo el cuerpo del
Siemens 3T Trio. En lugar de la bobina de la cabeza de la jaula de
pájaro utilizada en nuestro estudio anterior, hemos encontrado que
el uso de una bobina de cuello estándar coloca el elemento activo
más cerca del cerebro del perro. Aunque menos homogénea en la
cobertura de la jaula, el elemento superior está en estrecha
proximidad al cerebro del perro, que proporciona un superior relación
de señal a ruido (SNR) del cerebro en comparación con la bobina de
jaula de pájaros, especialmente en la parte dorsal de el cerebro
(SNR ~ 40 vs 17 con la jaula de pájaro.) que es más importante,
porque los hombros y el cuerpo del perro se encuentran fuera de la
bobina, estamos menos limitados por el tamaño de tema. Podemos
acomodar las cabezas más grandes simplemente bajando la mentonera.
El resto
de la barbilla se construyó a partir de planchas firmes de espuma,
que están pegadas entre sí para formar una pila. Los semicírculos
se recortaron para que coincidieran con la forma del hocico del perro
con la nariz corta a la rama de la mandíbula. Para fines de
formación, una maqueta de madera contrachapada de la bobina del
cuello se construyó para cada perro. A continuación, insertamos la
barbilla de encargo del resto del perro dentro del diámetro interior
de la bobina.
Al
realizar un análisis real, inmediatamente antes de la exploración,
jugamos grabaciones de audio de la secuencia de exploración
pertinente a través del altavoz en la sala del escáner. A medida
que el perro se instala en el escáner, aumentamos el volumen
registrado para que coincida con el nivel de decibelios del ruido del
escáner real. Durante la reproducción de un bucle continuo de la
grabación, una vez que ajustamos el nivel del sonido entonces
comenzamos la exploración real. Las grabaciones son muy eficaces en
reducir al mínimo la respuesta de sobresalto que de otro modo
resultaría de la aparición repentina de la exploración real. Una
vez que comienza la exploración real, apagamos la grabación del
escáner.

En
primer lugar, la imagen de un solo plano sagital se adquiere como un
localizador, que dura 3 segundos (secuencia SPGR, grosor de corte = 4
mm, TR = 9,2 ms, TE = 4,16 ms, flip = ángulo de 40 °, 256 × 256
matriz, FOV = 220 mm). El sonido del localizador tiende a ser la más
sorprendente y desagradable para los perros. Esto se minimiza
mediante la adquisición de un solo plano. Debido a que la mentonera
centra el perro en la dirección izquierda o derecha, una sola imagen
sagital es todo lo que es necesario para la planificación del campo
de visión, para los análisis posteriores.
En las
exploraciones funcionales, se utilizó un solo disparo de imagen
plana echo (EPI) para adquirir volúmenes de 25 secuenciales
rebanadas 3 mm con una separación de 10% (TE = 28 ms, TR = 1400 ms,
flip = ángulo de 70 °, 64 × 64 matriz, FOV = 192 mm). (Los dos
perros iniciales, Callie y McKenzie, fueron escaneadas en la bobina
de jaula con 28 divisiones y un TR = 1610 ms. Huxley también fue
escaneada en la jaula debido a la preferencia de formación.)
Los
sectores se orientan dorsalmente al cerebro del perro (coronal al
imán porque el perro se coloca 90 º de la orientación humana
habitual) con la dirección de codificación de fase de derecha a
izquierda. Se prefieren las exploraciones secuenciales para minimizar
los desplazamientos entre planos cuando el perro se mueve. La brecha
de las división 10% minimiza la diafonía para adquisiciones
secuenciales. La codificación de fase izquierda a derecha minimiza
las imágenes fantasma del cuello que de otra manera se solapan en el
cerebro del perro.
El TR es
tan corto como sea posible para adquirir suficientes divisiones para
cubrir todo el cerebro de la mayoría de los perros, mientras que no
tan cortos como para disminuir de manera significativa de la señal.
Aunque quizás no tan significativo para el fMRI, el ángulo de
inclinación fue todavía elegido para que coincida con el ángulo de
Ernst para la materia gris. Para cada perro, dos pasadas de
aproximadamente 400 volúmenes fueron adquiridos, con una duración
de unos 10 minutos.
Después
de las pistas funcionales, una imagen estructural en T2 fue adquirida
con una secuencia de eco de espín turbo (25 divisiones de 2 mm, TR =
3940 ms, TE = 8,9 ms, ángulo de inclinación = 131 °, 26 trenes de
eco, 128 × 128 matriz, FOV = 192 mm), que duró 24 segundos. Esta
secuencia se ha optimizado para obtener un buen contraste entre la
materia gris y blanca en el menor tiempo posible. Es importante
destacar que, hay que señalar que, debido al bajo peso de algunos
perros, la secuencia estructural puede exceder el límite de la FDA
de SAR para los seres humanos.

Aunque
no hay un límite de SAR para los perros, asumimos el mismo límite,
como si fueran seres humanos (4 W / kg de media en todo el cuerpo
para cualquier período de 15 minutos o 3 W / kg en la cabeza durante
un período de 10 minutos). Disminuyendo el ángulo de cara es una
manera eficaz para disminuir SAR. En nuestra cohorte, la RAE es
típicamente 1.5-2 W / kg, pero ha sido tan alto como 3.97 W / kg en
el perro más pequeño. Incluso en ese nivel, la exploración es sólo
24 segundos de duración que significa un aumento insignificante en
la temperatura del tejido.
La
grabación de los eventos
Los
eventos de la prueba fueron registrados por un observador a través
de una caja de botones compatible con cuatro botones de resonancia
magnética. Estos eventos incluyen la aparición de las señales con
la mano, desplazamiento, y la recompensa. Un ordenador portátil con
Matlab (MathWorks) y Cogent (FIL, University College London) se
conecta a través del puerto serie de la caja de botones, y se
registra tanto la respuesta de la caja botón por el observador, así
como los impulsos de la secuencia del escáner.
La
Tarea
Se
utilizó una tarea de condicionamiento instrumental sencillo en el
que el comportamiento requerido era colocar la cabeza en la mentonera
y no moverse. Después de un intervalo variable de aproximadamente 5
segundos, se le dio una señal con la mano que indica la presencia o
ausencia de un premio de comida que se recibiría. La mano izquierda
indica una recompensa de comida (un pequeño trozo de salchicha),
mientras que las dos manos apuntando hacia la otra en sentido
horizontal indicando que no había ninguna recompensa. Las señales
con la mano fueron elegidas para ser fáciles de distinguir y se
mantuvieron durante aproximadamente 10 segundos. El perro tenía que
continuar sosteniendose aún durante este período.

Los
perros habían sido ampliamente adiestrados en estas señales con la
mano en el simulador antes de la última sesión de exploración.
Debido a que los perros habían sido adiestrados para entrar en la
bobina de la cabeza en una posición "esfinge", el
controlador dio las señales de mano del extremo de la cabeza del
escáner, frente al perro. Se realizaron 20 repeticiones de cada tipo
de ensayo (un total de 40 ensayos), dividido en partes iguales entre
dos pasadas funcionales. Los tipos de la prueba eran al azar en
orden. Para asegurarse de que los perros prestaban atención a la
aparición de la señal con la mano, se mantuvo la señal con la mano
de la recompensa hasta que el alimento ha sido efectivamente
entregado.
Esto
impidió que los perros asociaran el desplazamiento de la señal con
la comida. La recompensa de alimentos siempre se entrego en la mano
derecha, y fue entregado directamente a la boca del perro al llegar a
la cavidad. El consumo de alimentos dio lugar a movimientos de la
cabeza, pero los perros fueron adiestrados para reemplazar a la
cabeza en la mentonera y esperar la señal de la mano siguiente. La
señal de la mano siguiente comenzó aproximadamente 5 segundos
después de que el perro se había reemplazado la cabeza en la
mentonera. Este intervalo permitido durante varios TRs volvieron a
estabilizar la señal del MR. Los escáneres durante el período de
consumo de alimentos fueron normalmente descartados del análisis.

Preprocesamiento
y análisis
Todos
los datos funcionales serán pre-procesadas usando el AFNI y sus
funciones asociadas. Los archivos DICOM de las pistas del PAI se
convirtieron primero en formato AFNI BRIK con el comando to3d. Las
pistas del PAI se sometieron a una corrección de movimiento
utilizando transformación afín 6 parámetro de 3dvolreg, empleando
un método de dos pasos, donde los resultados de primer paso en una
alineación bruta y el segundo pase un buen alineamiento. Todos los
volúmenes se han ajustado a un volumen de referencia, que era o el
primer volumen de la primera pasada, o un volumen seleccionado de
forma manual desde la primera pasada sobre la base de una inspección
visual.
Tres
métodos diferentes fueron utilizados para censurar los volúmenes
con los artefactos de movimiento restantes. En primer lugar,
3dToutcount se utilizó para la producción de la fracción de los
voxels de valores atípicos para cada volumen. 3dToutcount define
valores atípicos como los voxels cuya intensidad de la señal se
desvía de la desviación absoluta media de la serie temporal. Los
volúmenes con una fracción más grande que uno corto (0,1 ó 0,001,
dependiendo del perro) fueron censurados en el análisis estadístico.
En
segundo lugar, se utilizó 1d_tool.py para censurar volúmenes
basados en la cantidad de movimiento estimado emitida desde 3dvolreg.
1d_tool.py calcula la derivada de la serie de tiempo restando de cada
volumen del volumen anterior, así como la norma euclidiana de los
parámetros de rotación y traslación emitidas desde 3dvolreg. Se
utilizó una norma de corte euclidiano que variaba entre 1 y 1,6,
dependiendo de la materia, para generar el archivo de censor.
Por
último, se inspeccionaron visualmente la serie resultante tiempo con
los volúmenes censurados desde 3dToutcount y 1d_tool.py y censurados
los volúmenes que mostraban artefactos obvios. En promedio, el 43%
de los volúmenes totales del PAI se mantiene para cada sujeto (que
van desde 30% - 59%).
Las
imágenes del PAI se alisan y se normalizaron al % del cambio de
señal. El suavizado se aplicó mediante 3dmerge, con un núcleo de 6
mm en el Ancho Total de la mitad del máximo (FWHM). El tamaño del
núcleo de suavizado se eligió basándose en el tamaño previsto de
la respuesta estriatal a la predicción de recompensa señal de la
mano. Para convertir los valores de intensidad de señal en% cambio
de señal, se utilizó 3dcalc restar y dividir por la imagen EPI
media (generada a partir del 3dTstat opción media). Estos valores se
convirtieron después en porcentajes multiplicando por 100. Estas
imágenes del PAI escala resultantes se introducen en el Modelo
Lineal General.
Para
cada tema, un modelo lineal general se estimó para cada voxel
utilizando 3d deconvoluido. Los regresores relacionados con las
tareas en este modelo incluyen, 1) Señal con la mano con la
recompensa, 2) señal con la mano sin la recompensa, y 3) el consumo
de recompensa. Los tres regresores relacionados con las tareas eran
las funciones de impulso, es decir, su duración no fue modelada. En
nuestro experimento original, se observó que la función de la
respuesta hemodinámica (HRF) en el caudado alcanzó su punto máximo
entre los 3 y 6 segundos después de la aparición de la señal de la
mano, que es similar al caudado HRF humana. En base a esto, todos los
eventos fueron convolucionados con una sola función gamma. Se
utilizó la función de GAM en 3ddeconvolve de AFNI con los
parámetros por defecto, lo que resulta en un HRF que culmina a los 5
segundos. Para ayudar a controlar el movimiento del sujeto, 6
regresores de movimiento emitidos desde 3dvolreg también fueron
incluidos en el modelo. Para dar cuenta de las diferencias entre las
pasadas, se incluyó un término que derivaba constantemente y una
lineal para cada ejecución.
Debido
a la heterogeneidad en la forma del cerebro canino y el tamaño esto
impide la normalización de grupo, se realizó un análisis de
retorno de la inversión individual en base. Para cada perro, dos
esférica ROI (radio de 6 mm) se encuentra anatómicamente en la
imagen media EPI y correspondió a la caudado ventral izquierda y
derecha. Aunque el caudado no es claramente visible en las imágenes
de EPI, podemos aproximar visualmente su anterior ubicación para el
"chevron" creado por la cápsula interna y posterior al
bulbo olfatorio y por referencia a la imagen estructural del perro.
Después, la diferencia media en respuesta a la señal con la mano de
la recompensa contra la señal con la mano sin la recompensa, se
calculaba a partir de estas regiones de interés. Los valores de
retorno de la inversión se analizaron con un modelo de efectos
mixtos en SPSS 21 (IBM). Este modelo incluyó los efectos fijos de
señal con la mano (la recompensa, no hay recompensa) y lateral
(izquierda, derecha), x lado de la señal como un efecto repetido, y
el perro como un efecto aleatorio.
Los
Resultados
Al
contrastar la señal con la mano con la recompensa a la señal con la
mano sin ninguna recompensa, 8 de cada 13 perros (62%) mostraron una
señal diferencial positiva en el caudado (un promedio de más
izquierda y derecha). Sin embargo, un perro - Caylin - era un caso
atípico negativo basada en la prueba de Grubbs (Z = 2,37) y,
posteriormente, fue excluido de los nuevos análisis. Con el modelo
de efecto mixto de los perros restantes, señal con la mano fue
significativa [F (1,36) = 4,81, p = 0,035], pero el equipo no era [F
(1,36) = 0,01, p = 0,940]. La comparación por parejas de la
recompensa contra la señal sin la recompensa mostraron una
diferencia media de 0,093% (0,042% sí), lo que indica un efecto
positivo consistente con nuestro estudio original.
La
heterogeneidad de los sujetos de estos resultados es tan interesante
como la replicabilidad. De manera similar a los estudios en los
humanos, toda la activación del cerebro mostró diversos patrones y
la intensidad de la actividad a través de la corteza en cada uno de
los sujetos. Pero dentro de las regiones de interés caudado, no hubo
diferencias significativas en la izquierda, de la activación de la
derecha. De hecho, la mayoría de los perros tenían niveles
similares de activación de ambos lados. Un perro tenía una
activación diferencial positivo a la derecha y negativo a la
izquierda, que, cuando se promediaron ambos lados juntos dio como
resultado una "desactivación" aparente a la señal con la
mano de la recompensa. Esto parece ser el patrón de los pocos perros
que tenían desactivaciones aparentes, con el valor medio se conduce
negativa por la izquierda o caudado derecho, con el otro lado es
positivo o cercano a cero.
CONTINÚE..
Por: Gregory S. Berns - Andrew Brooks - Mark Spivak - Trad; Erik Farina
Copyright © Psicolmascot.
Por: Erik Farina (Psicólogo Canino)
Copyright
2013 Psicolmascot. All rights reserved. This material may not be
published, broadcast, rewritten or redistributed.
- Derechos de autor 2013 Psicolmascot. Todos los derechos reservados.
Este material no puede ser publicado, transmitido, reformado o
redistribuido.






